Робот на лазерному управлінні
Розроблений пристрій являє собою електронну іграшку, керовану світловими імпульсами на відстані, а саме - за допомогою лазерної указки. В якості світлових датчиків у пристрої використовуються чотири фоторезистори. Робот виконує команди: Вперед, Вправо, Вліво, Стоп. Керування роботом здійснюється подачею світлових імпульсів на датчики (фоторезистори). Кожен датчик відповідає за певну команду. Датчик, розташований "на носі" корпусу робота, відповідає за команду Вперед, лівий фоторезистор - поворот Вліво, правий фоторезистор - поворот Вправо, фоторезистор, який знаходиться ззаду - команда Стоп. Обробку сигналів, прийнятих з фоторезисторів, виконує програма ініціалізації мікроконтролера. У представленій схемі пристрою використовується мікроконтролер PIC16F872. Живлення пристрою здійснюється від трьох пальчикових батарей номіналом 1,5 В. Схема розробленого пристрою представлена на рисунку 1. На рисунку 2 показано зовнішній вигляд пристрою без корпусу. Розводка друкованої плати двошарова (рис. 3). Пристрій був змодельовано в програмі Crocodile Technology. Дана програма має свій PCB-редактор (рис. 4 - Розводка друкованої плати пристрою в PCB-редакторі програми Crocodile Technology). Рисунок 5 демонструє алгоритм роботи програми ініціалізації мікроконтролера.
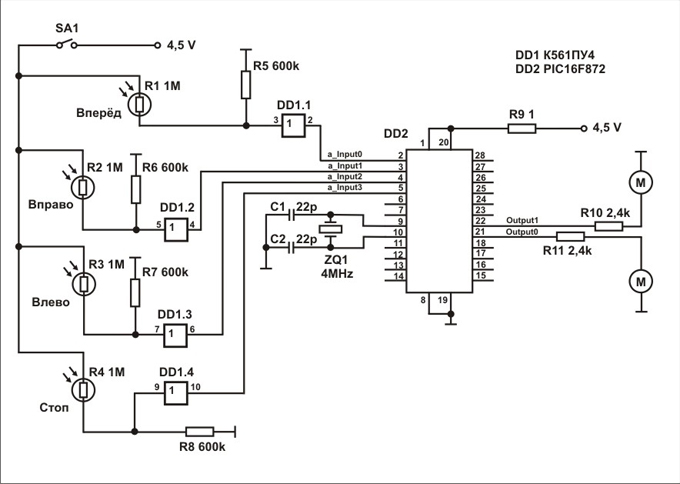
Рис. 1. Схема розробленого пристрою.

Рис. 2. Зовнішній вигляд пристрою без корпусу.
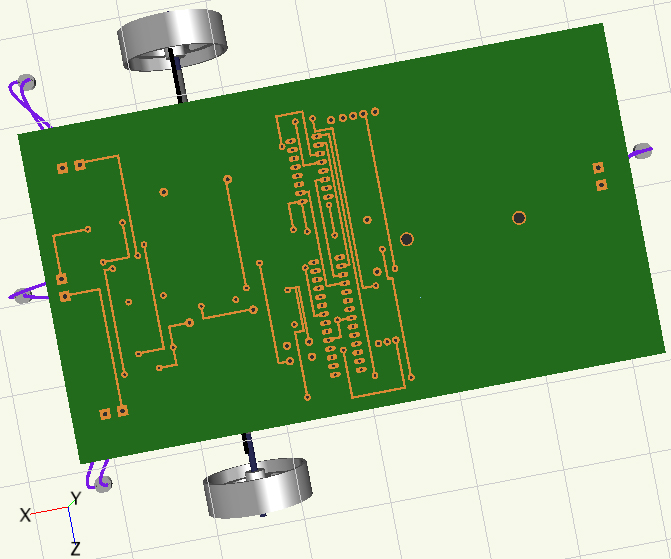
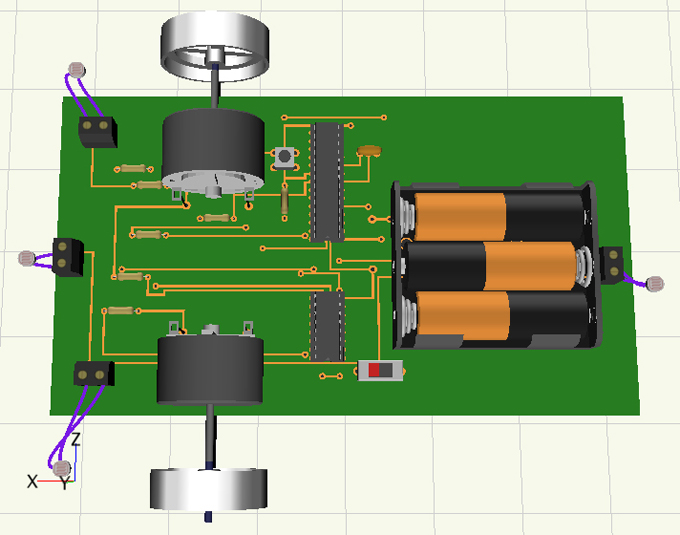
Рис. 3. Розводка друкованої плати.
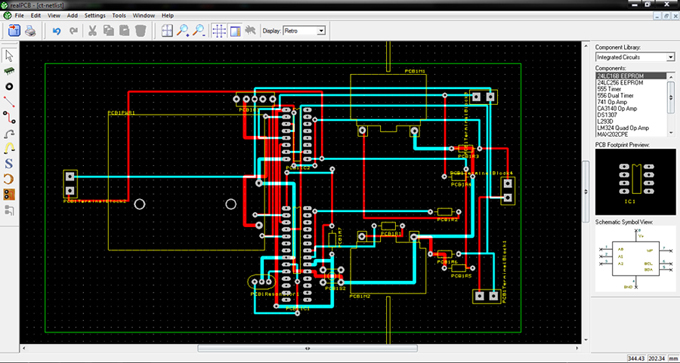
Рис. 4. Розводка друкованої плати в PCB-редакторі програми Crocodile Technology.
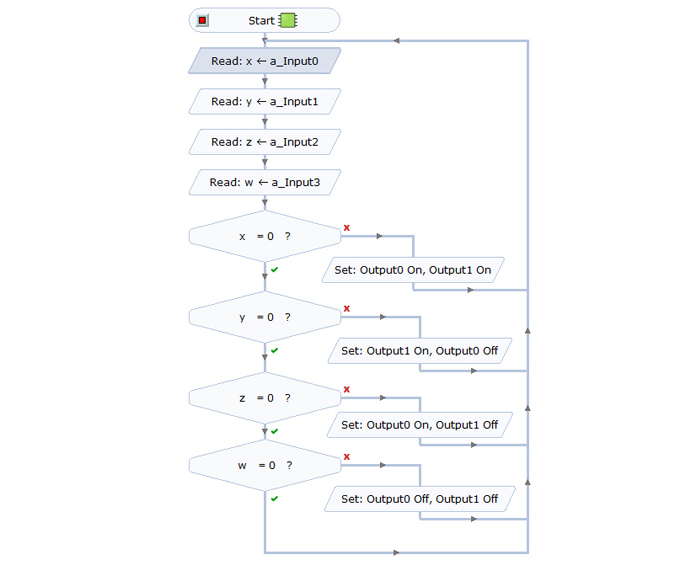
Рис. 5. Алгоритм роботи програми ініціалізації мікроконтролера.
Програма опитує порти мікроконтролера. Якщо на якомусь із портів з'являється логічна одиниця (спрацьовує фотодатчик) - на виходи мікроконтролера подається одна з комбінацій: 11, 01, 10, 00, що призводить у рух (або навпаки – зупиняє) відповідний мотор, а значить і колесо робота.
Таблиця 1. Таблиця логічних сигналів управління пристроєм.
| Вхід МК | Вихід МК | Команда |
| 1000 | 11 | Вперед |
| 0100 | 01 | Вправо |
| 0010 | 10 | Вліво |
| 0001 | 00 | Стоп |
Схема і змодельоване пристрій у програмі Crocodile Technology знаходиться в прикріпленому файлі Sxema_robot.cxt. Причина, через яку не можна в даній схемі використовувати шифратор. Комбінація логічних сигналів зберігається на виходах мікроконтролера до тих пір, поки на його вході не з'явиться нова команда (нова логічна одиниця - імпульс світла). Тобто програма мікроконтролера не реагує на комбінацію 0000 на вході. При використанні шифратора при зникненні імпульсу світла пристрій зупиниться. Таким чином, для того, щоб робот був у русі - необхідно було б постійно утримувати світловий промінь на датчику, що, на мою думку, незручно при управлінні пристроєм. У нашому випадку для того, щоб привести в рух пристрій, достатньо короткочасного імпульсу світла.
Список радіоелементів
| Позначення | Тип | Номінал | Кількість | Примітка |
|---|---|---|---|---|
| DD1 | Мікросхема | К561ПУ4 | 1 | |
| DD2 | МК PIC 8-біт |
PIC16F872
|
1 | |
| С1, С2 | Конденсатор | 22 пФ | 2 | |
| R1-R4 | Фоторезистор | 1 МОм | 4 | |
| R5-R8 | Резистор |
600 кОм
|
4 | |
| R9 | Резистор |
1 Ом
|
1 | |
| R10, R11 | Резистор |
2.4 кОм
|
2 | |
| ZQ1 | Кварцовий резонатор | 4 МГц | 1 | |
| Електродвигун | 2 | |||
| SA1 | Вимикач | 1 | ||
| Батарея живлення | 1.5 В | 3 |
Прикреплені файли:
- Sxema_robot.rar (31 Кб)