Невеликий настільний робот для гонок по лінії

Існує безліч видів змагань з робототехніки. А опис деяких цікавих проектів можна знайти в Інтернеті. Гонки по лінії – це такий вид змагань, в якому різні роботи змагаються в швидкості слідування по лінії. Я зробив крихітного робота, який може ганяти по столу. Це просто іграшка, її розміри менше однієї п’ятої в порівнянні з типовими роботами для змагань. Але я вважаю, що вона підходить для домашнього використання в невеликих будинках і квартирах.
Про "Гонщика по лінії"
"Гонщик по лінії" – це простий робот, який слідує по лінії, намальованій на підлозі. Ось основні функції такого робота:
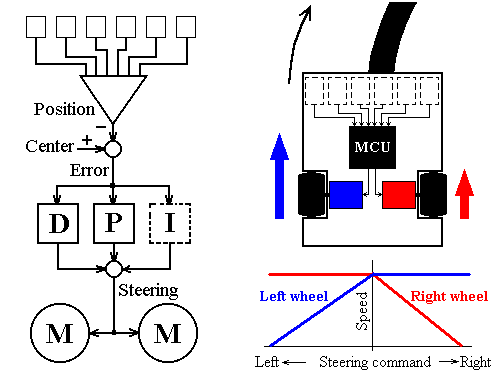
1) Визначення положення лінії за допомогою оптичних сенсорів, встановлених спереду робота. Більшість таких датчиків реагують на відбитий світло, але деякі круті роботи оснащені датчиком зображення для обробки зображень. Процес вимагає надійних і високоточних датчиків.
2) Поворот робота.
3) Управління швидкістю. Швидкість руху знижується при проходженні поворотів, щоб робот не злетів з лінії.
Є два типи ліній – білі лінії на чорному фоні і чорні лінії на білому фоні. Найчастіше використовується перший тип, з товщиною лінії від 15 до 25 міліметрів.
Залізо
Механіка
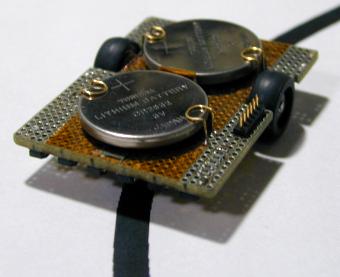
На картинці вид робота знизу і збоку. Вся механіка і електроніка змонтовані на макетну плату, і вона також представляє собою шасі робота.
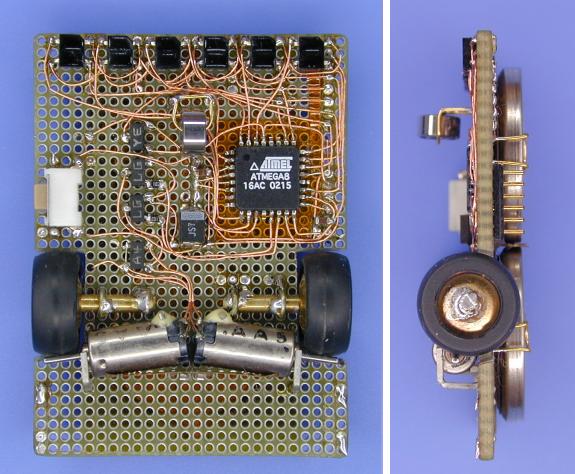
Робот має три точки опори: два провідних колеса з гумовими шинами і маленьке колесо, яке вільно обертається. Провідні колеса мають діаметр 7 мм. Маленьке колесо має діаметр 5 мм. Для приводу провідних коліс використовуються два вібромоторчики. Їх вали притискаються до шини, і крутний момент передається на колеса.
Для повороту використовується різниця в швидкості обертання лівого і правого колеса. Це не вимагає ніяких додаткових приводів.
Електроніка
Мозги: ATmega8
Датчики лінії: Шість датчиків, що реагують на відбитий від лінії світло
Живлення: Дві літієві CR2032 (Одна для управління, інша для двигунів)
Двигуни: Вібромотори
Розміри: 45x33x12,5 [мм]
Вага: 15 грамів (Робот: 8g, Батареї: 7g)
Швидкість: 53 сантиметри в секунду при овальній лінії
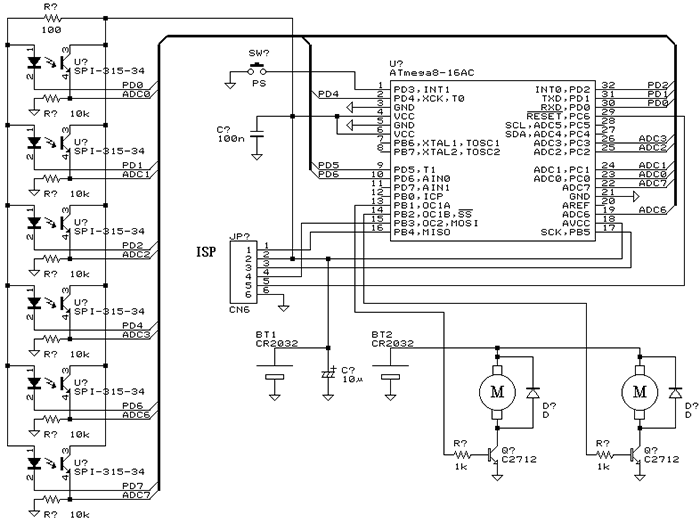
Для управління використовується мікроконтролер Atmel ATmega8. Він живиться від літієвої батарейки на 3В. Від іншої літієвої батарейки живляться двигуни. Роздільне живлення зроблено для того, щоб уникнути випадкового скидання мікроконтролера через просадки напруги. Шість датчиків кріпляться на передній частині шасі. Вони приймають відбитий світло від лінії під ними. Для управління двигунами використовується ШІМ.
Програма
Принцип роботи датчиків
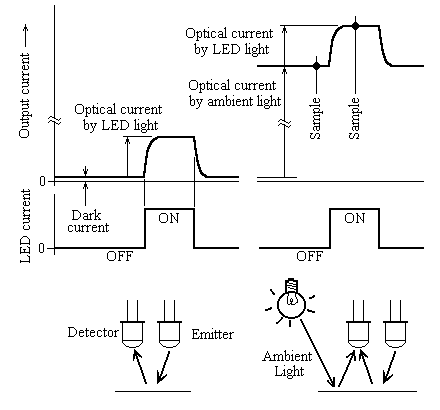
Для виявлення лінії, по якій необхідно слідувати, більшість роботів оснащені двома або більше датчиками-відбивачами. Напруга на ньому пропорційна ступеню відбиття світла від лінії. Приймається рішення – виявлена лінія чи ні. Тим не менше, це рішення не завжди правильне, оскільки датчик може засвітитися зовнішнім джерелом світла, як показано на малюнку.
У більшості датчиків для промислового застосування використовуються модуульований сигнал, щоб уникнути перешкод. У приймачі застосовані фільтри, тому приймач може виявити тільки модуульований сигнал.
У цьому проекті датчики скануються послідовно, щоб уникнути засвітки з інших датчиків. Мікроконтролер починає сканувати стан датчика, отримує зразок напруги з датчика, вмикає світлодіод і знову перевіряє напругу. За різницею між двома можна судити про положення робота відносно лінії. Засвітка при такому способі виключається. Всі інші датчики скануються в такій же послідовності.
Обробка сигналів з датчиків
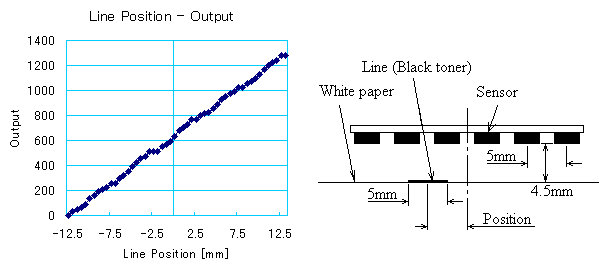
Мікроконтролер сканує шість датчиків і визначає положення лінії. Положення лінії може бути виявлено лінійно тільки з шістьма датчиками.
Якщо робот злітає з лінії або лінія закінчується, двигуни зупиняються, і мікроконтролер переходить у сплячий режим.
Список радіоелементів
| Обозначення | Тип | Номінал | Кількість | Примітка | ||
|---|---|---|---|---|---|---|
| U | МК AVR 8-біт |
ATmega8
|
1 | |||
| Q | Біполярний транзистор |
2SC2712
|
2 | |||
| U | Датчики лінії | Spi-315-34 | 6 | |||
| R | Резистор |
10 кОм
|
6 | |||
| R | Резистор |
1 кОм
|
2 | |||
| R | Резистор |
100 Ом
|
1 | |||
| C | Конденсатор | 100 нФ | 1 | |||
| C | Електролітичний конденсатор | 10 мкФ | 1 | |||
| D | Діод | 2 | ||||
| BT1, BT2 | Літієва батарея | СR2032 | 2 | |||
| SW | Кнопка | 1 | ||||
| M | Вібромотор | 2 | ||||
| JP | Панелька | 1 | 6 Штырьков | |||
Прикреплені файли:
- ltc.rar (16 Кб)