Машинка, керована стільниковим телефоном

Моделі з радіоуправлінням використовують ВЧ схеми, які мають обмежений робочий діапазон, обмежений частотний діапазон і проблеми з узгодженням з контролерами. Використання мобільного телефону для керування моделлю дозволяє уникнути цих недоліків. При використанні мобільного телефону, моделлю можна керувати по всій зоні покриття оператора і без проблем працювати з зовнішніми пристроями.
Хоча зовнішній вигляд і можливості моделі можуть значно варіюватися, всі моделі мають механічну частину і частину, яка керує моделлю. Керування моделлю включає в себе три етапи: прийом команди, обробка та виконання. Як правило, команди дають зовнішні датчики, обробкою займається мікроконтролер, а для виконання використовуються двигуни.
Огляд
В даній машинці для керування використовується два мобільних телефони – один у вас в руках як пульт ДУ, інший встановлений на моделі як приймач. З вашого телефону на телефон моделі надходить дзвінок, і при натисканні вами під час дзвінка клавіш, з мобільного телефону надходить багаточастотний сигнал. Цей сигнал називається Dual-Tone Multi-Frequency (двохтональний багато частотний сигнал) (DTMF).
За допомогою DTMF декодера MT8870, DTMF декодується в двійковий код, який обробляється мікроконтролером ATmega16, а потім віддає команду драйверу двигуна.
Як видно, ця модель досить проста і не вимагає конструювання складних передавачів.
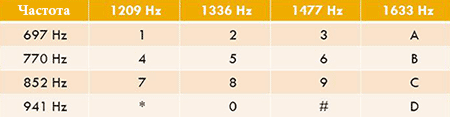
DTMF сигнал використовується для набору телефонного номера або голосового авто відповідача.
Сигнал складається з двох синусоїдальних сигналів фіксованої частоти, і легко декодується в двійковий код і назад. Для кодування символу в DTMF сигнал необхідно скласти два синусоїдальних сигнали. Наприклад, якщо потрібно передати цифру 5, то частота одного сигналу буде 1336 Гц, а іншого 770 Гц, і цей сигнал ми отримаємо на другому телефоні.
Опис схеми
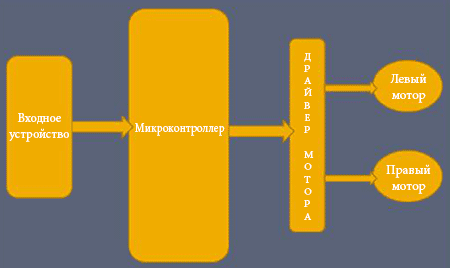
На блок-схемі показано принцип роботи пристрою. Основними його компонентами є DTMF декодер, мікроконтролер і драйвер двигунів.
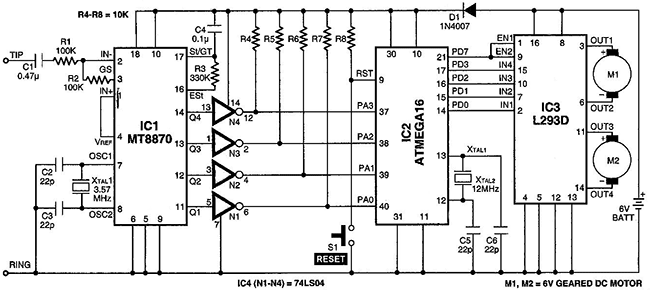
В якості DTMF декодера використовується мікросхема MT8870. В ній використовуються цифрові методи розпізнавання сигналу і видається сигнал на 4 виходи. Також вона не вимагає попередньої фільтрації вхідного сигналу. При подачі вхідного сигналу на PIN2 (В-), декодований сигнал виходить на виходах від Q1(pin11) до (pin14).
ATmega16 - це 8-бітний КМОП мікроконтролер на основі розширеної AVR RISC архітектури з низьким енергоспоживанням. Він має 16 КБ програмованої флеш-пам'яті, 512 Б EEPROM, 1 КБ SRAM, 32 ліній введення/виведення і 32 регістри. З виходів мікроконтролера PD0 - PD3 і PD7 подається сигнал на виходи IN1 - IN4 і EN1-EN2 драйвера двигунів L293d. Перемикач S1 використовується для ручного скидання.
Програма
Мікроконтролер програмується за допомогою WIN AVR. Хто не знає як це робити, подивіться тут, там все докладно описано. До статті додається вихідний код і hex файл. Якщо встановлена WinAVR, то проблем з відкриттям виникнути не повинно.
Робота
Для того, щоб керувати моделлю, ви повинні зателефонувати на мобільний телефон моделі з будь-якого телефону. Коли машинка автоматично відповість, натискайте наступні клавіші:
2 – рух вперед.
4 – поворот вліво.
8 – рух у зворотному напрямку.
6 – поворот направо.
5 – зупинка.
Список елементів:
DTMF декодер MT8870 – 1.
Мікроконтролер Atmega16 – 1.
Драйвер двигуна L293d – 1.
ОУ Cd7004 – 1.
Діод 1N4007 – 1.
Резистор 100 кОм – 2.
Резистор 10 кОм – 5.
Резистор 330 кОм – 1.
Конденсатор 0.47мкФ – 1.
Конденсатор 0.1мкФ – 1.
Конденсатор 22пФ – 4.
Кварц 3.57 МГц – 1.
Кварц 12 МГц – 1.
Кнопка без фіксації – 1.
Мотори(6В, 50 rpm) – 2 або 4 для повного приводу.
Акумулятор 6В – 1.
Колеса – 4.
Мобільний телефон – 2.
Гучний зв'язок (hands - free) – 1.
Ви повинні зміцнити телефон на шасі. Телефон підключено до робота через гарнітуру hands – free.
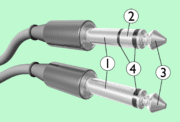
Підключення hands - free
Я використав hands – free з роз'ємом mini jack.
Скачати вихідний код програми та прошивку ви можете нижче
Список радіоелементів
| Позначення | Тип | Номінал | Кількість | Примітка | ||
|---|---|---|---|---|---|---|
| IC1 | DTMF декодер | МТ8870 | 1 | |||
| IC2 | МК AVR 8-біт |
ATmega16
|
1 | |||
| IC3 | Драйвер електродвигунів | L293D | 1 | |||
| IC4 | ІС буфера, драйвера |
SN74LS04
|
1 | |||
| D1 | Випрямляючий діод |
1N4007
|
1 | |||
| С1 | Конденсатор | 0.47 мкФ | 1 | |||
| С2, С3, С5, С6 | Конденсатор | 22 пФ | 4 | |||
| С4 | Конденсатор | 0.1 мкФ | 1 | |||
| R1, R2 | Резистор |
100 кОм
|
2 | |||
| R3 | Резистор |
330 кОм
|
1 | |||
| R4-R8 | Резистор |
10 кОм
|
5 | |||
| XTAL1 | Кварцевий резонатор | 3.57 МГц | 1 | |||
| XTAL2 | Кварцевий резонатор | 12 МГц | 1 | |||
| S1 | Кнопка | 1 | ||||
| М1, М2 | Електродвигун | 6 Вольт | 2 | |||
| BATT | Батарея живлення | 6 Вольт | 1 | |||
Прикріплені файли:
- cell_phone_robot.zip (18 Кб)