Автономний танк на Arduino

Робот складається з шасі від радіокерованого танка та кількох інших компонентів, список яких наведений нижче. Це мій перший проект на Arduino, і платформа Arduino мені сподобалася. Під час створення цього робота я користувався матеріалами з книг і інтернету.
Необхідні матеріали
1. Шасі від радіокерованого танка.
2. Arduino Uno.
3. Макетна плата та перемички.
4. Інтегральний драйвер моторів SN754410NE.
5. Стандартний сервопривод.
6. Ультразвуковий дальномір.
7. 9В батарея та роз'єм для неї.
8. 4 батарейки D і роз'єм для них.
9. Кабель USB A-B.
10. Основа 6"х 6".

Інструменти
1. Набір викруток.
2. Термопістолет з клеєм.
3. Припій і паяльник.
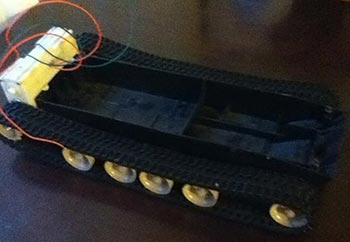
Шасі
Шасі я взяв з танка, купленого за 10$. Основа може бути прикріплена до нього в будь-якому місці, але я прикріпив її посередині.
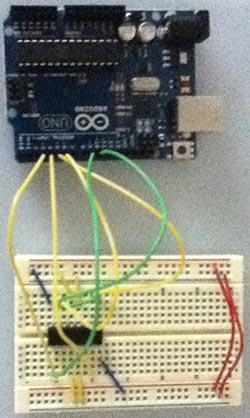
Драйвер двигуна SN754410NE
Для управління двигунами я використовував драйвер SN754410NE. Я застосував його, тому що він у мене був, але ви можете використовувати інший, наприклад L293.
Тепер про підключення драйвера до Arduino Uno. Усі виводи GND (4,5,12,13) підключіть до GND макетної плати. Контакти драйвера 1 і 16 підключіть до виводів 9 і 10 Arduino. Контакти драйвера 2 і 7 підключіть до контактів 3 і 4 Arduino, це контакти управління лівим двигуном. Контакти драйвера 10 і 15 підключіть до виводів 5 і 6 Arduino, це контакти управління правим двигуном. Контакти 3 і 6 підключіть до лівого мотора, а контакти 14 і 11 до правого. Контакти 8 і 16 повинні бути підключені до живлення на макетній платі. Джерело живлення: 9В батарея.
Установка дальноміра
Ультразвуковий дальномір допомагає роботу уникати перешкод під час руху. Він розташований на стандартному сервоприводі, який знаходиться на передній частині робота. Коли робот помічає об'єкт на відстані 10 см, сервопривід починає обертатися, шукаючи прохід, а потім Arduino вирішує, яка сторона найбільш прийнятна для пересування.
Приклейте до нього роз'єм для підключення. Обмежте сервопривід так, щоб він не міг обертатися більше ніж на 90 градусів у кожну сторону.
На датчику є три контакти GND, 5В і сигнал. GND підключіть до GND, 5В до 5В Arduino і сигнал підключіть на 7 контакт Arduino.

Живлення
Arduino живиться від батарейки 9В через відповідний роз'єм. Для живлення двигунів я використовував 4 батарейки розміру D і відповідний роз'єм. Для живлення двигунів підключіть дроти від тримача до плати з SN754410NE.
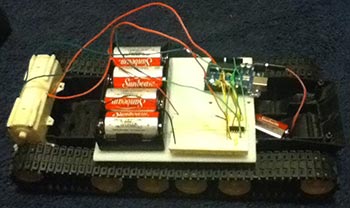
Збірка
Коли всі частини готові, настав час зібрати їх. Спочатку ми повинні прикріпити Arduino на основу. Потім за допомогою термоклею прикріпимо дальномір з сервоприводом на передню частину робота. Потім необхідно прикріпити батареї. Ви можете розмістити їх де завгодно, але я розмістив їх поруч з Arduino. Коли все готово, ви можете увімкнути робота, щоб упевнитись, що Arduino працює.
Програма
Отже, після збору робота настав час написати для нього програму. Провівши кілька днів, я написав її.
Робот буде рухатися по прямій, поки об'єкт на відстані більше 10 см. Коли він помічає об'єкт, він починає обертати датчиком, шукаючи шлях. Коли сканування завершено, програма вибирає оптимальну сторону для руху. Якщо робот у тупику, він розгортається на 180 градусів.
Програму можна завантажити нижче. Ви можете модифікувати та доповнювати її.
- ArduinoTank_Project.ino (2 Кб)