Біжучий рядок з механічною розгорткою
Приблизно рік тому я збирав схоже пристрій, але використовував при цьому не мікроконтролер, а звичайну логіку, та ще мікросхему пам'яті РФ5. Як наслідок – великі габарити, вага і енергоспоживання (акумулятора 800mAh вистачало на 5-10 хвилин роботи). Саме ці недоліки попереднього варіанту натягнули мене на створення цього. На відміну від свого попередника, він зібраний всього на одній мікросхемі і має стабілізацію "зображення".
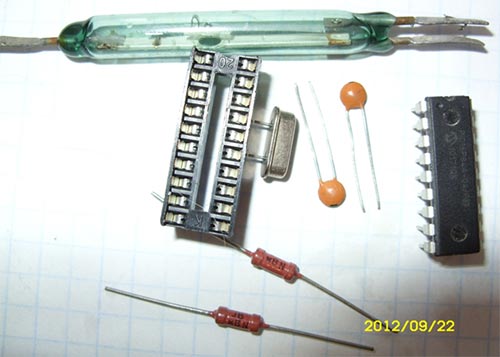
Для збору знадобиться ця купка деталей (не рахуючи друкованої плати, акумулятора і світлодіодів):
Ось схема пристрою:
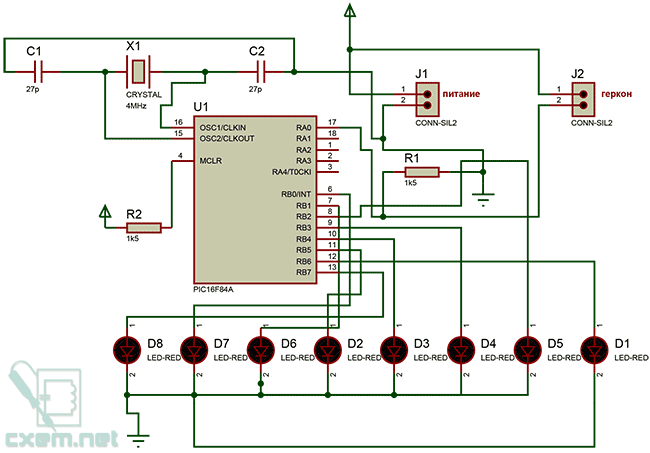
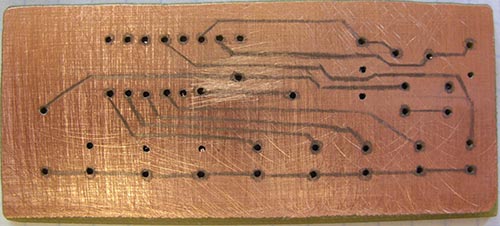
Як бачите, деталей небагато. Крім обв'язки генератора, тут всього лише ще два резистори, не рахуючи світлодіодів. Що стосується друкованої плати пристрою, тут справа обстоїть трохи складніше, так як я намагався зробити девайс як можна більш компактним (в розумних межах), в загальному судіть самі:
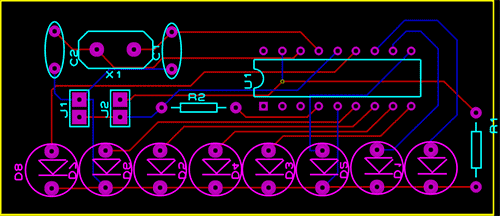
Плата вийшла 30х70. Щодо друкованих провідників: фактично значення не має, який шар буде на лицьовій стороні, який зі сторони деталей, але я розвів провідники червоного кольору зі сторони деталей, а провідники синього – на лицьовій (зі сторони компонентів).
Тепер про програму. Її я складав, використовуючи середовища програмування Flowcode. Кожну букву я малював "построчно". Ось головна гілка програми:

Як бачите, я вирішив не "звалювати все в купу" в головній гілці, а розподілив кожну букву по макросам. Наприклад, ось макрос букви "О":
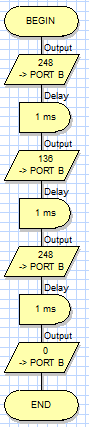
Відправляти в порт 0 потрібно для того, щоб не накладалося зображення. Виходячи з цього, якщо вам потрібно намалювати свою букву, достатньо по черзі відправляти змінні в порт, розглянемо, наприклад, створення букви "Т".
Для початку потрібно намалювати зразок:
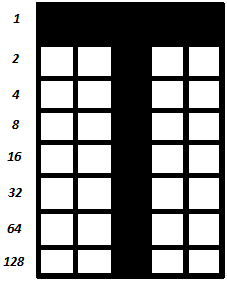
Далі знаходимо в інтернеті калькулятор bin-dec. Після вводимо в поле введення по черзі вертикальні стовпці малюнка (не зафарбована область -0, зафарбована –1). Причому, після кожного виводу змінної в порт ставимо затримку в 1мс, інакше буде дуже складно (якщо можливо) щось розібрати.
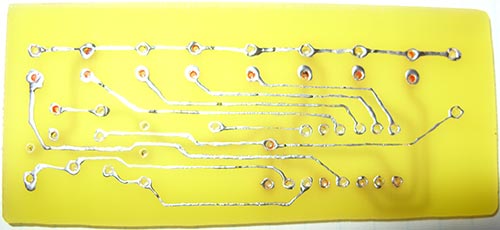
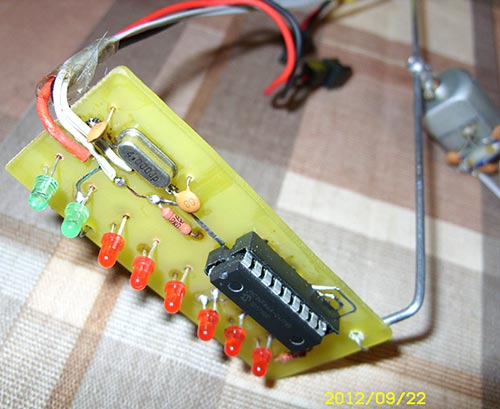
Ось весь процес збору, починаючи від травлення плати і закінчуючи готовим пристроєм.
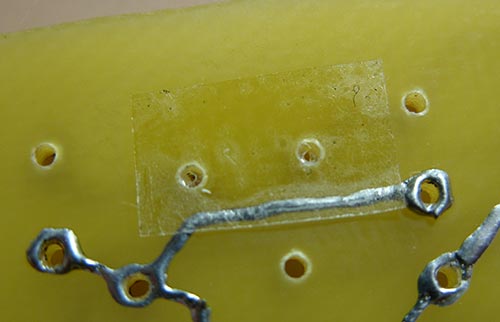
До речі, зверніть увагу на фото вище – так як друкований провідник торкається корпусу кварцового резонатора, я наклеїв там маленький шматочок скотча (взагалі-то, це робити не так вже й обов'язково, але вирішив перестрахуватися).

Механічна частина.
Ось схематичний малюнок кронштейна для кріплення і обертання плати:
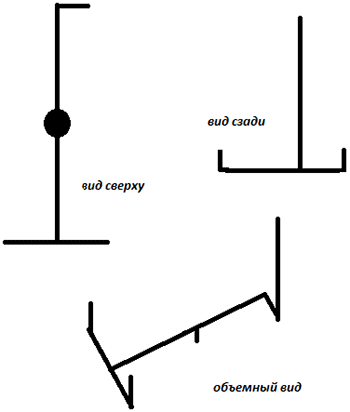
В реальній конструкції він виглядає так:

Для кріплення кронштейна до валу електродвигуна я використовував звичайні китайські клемники

Можна взяти будь-які, залежно від розмірів вала вашого електродвигуна (в моєму випадку підійшли на 6 А). Для наших цілей потрібна лише металева муфта з шурупами. Один шуруп потрібно викрутити, і на його місці просвердлити в протилежній стінці отвір. Потім в це отвір вставляється велосипедна спиця і запається. Другий шуруп ми будемо використовувати майже за призначенням – для фіксації вала двигуна. Так що виходить цілком надійний кріплення (принаймні у мене не злетіло жодного разу).

Деталі та їх заміна
В цій конструкції я використовував резистори МЛТ-0.125, кварцовий резонатор на 4MHz, дискові керамічні конденсатори, мікроконтролер фірми MICROCHIP PIC16F84A в корпусі DIP та геркон. До речі, що стосується геркона: взагалі-то можна взяти будь-який, але я вибрав відносно великий за розмірами, так як його легше кріпити. В моєму випадку кріплення геркона – скотч:

Нижче є відео роботи (не судіть за погане якість, фотік ну ніяк не хотів ловити в кадр рухомі світлодіоди).
Завантажити вихідники, прошивку, ПП, проект в Proteus та Flowcode ви можете нижче
- stroka_POV.rar (112 Кб)