Голосове управління освітленням X10. Частина 4
Продовження. Початок - Частина 1 та Частина 2 та Частина 3
В цій частині складемо покрокове керівництво по запуску системи в ROS
Передбачається, що плата мікроконтролера підключена до комп'ютера по USB, прилад PSC05 підключений до мережі, а через роз'єм RJ11 до плати мікроконтролера. Мікрофон (в мене бездротовий) підключений до комп'ютера. На комп'ютері встановлена операційна система linux і встановлений фреймворк ROS. Створено проект vp_x10_voice.
Наступні дії виконуємо в терміналі (я використовую Guake Terminal, що дозволяє відкривати одне вікно з безліччю закладок).
Запускаємо Guake Terminal
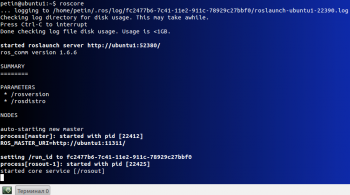
1 вкладка
$ roscore
2 вкладка
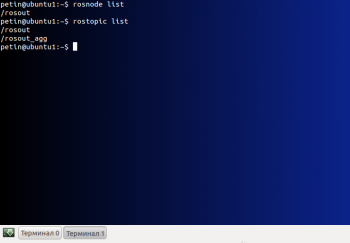
Дивимось список вузлів та тем
$ rosnode list
$ rostopic list
3 вкладка
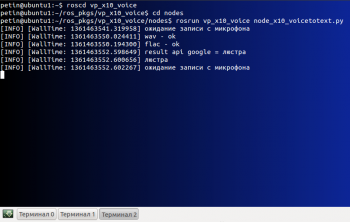
Запуск вузла перетворення голосу в текст і видача індексу вибраної команди
$ roscd vp_x10_voice
$ cd nodes
$ rosrun vp_x10_voice node_x10_voicetotext.py
4 вкладка
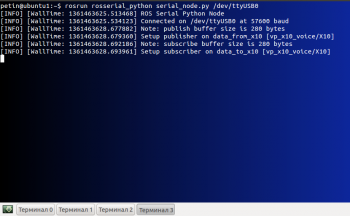
В ROS створюємо вузол serial_node.py пакета rosserial_python, який з'єднує нашу плату Arduino з рештою частини ROS (необхідно виставити використовуваний послідовний порт)
$ rosrun rosserial_python serial_node.py /dev/ttyUSB0
5 вкладка
Запуск вузла перетворення індексу вибраної команди в текст
$ rosrun vp_x10_voice node_x10_texttocommand.py
Заходимо у вкладку 2 і перевіряємо список вузлів та тем
$ rosnode list
$ rostopic list
Тепер вимовляємо голосові команди і дивимось результат
На цьому поки все.