Arduino Uno. Підключення ІК-приймача
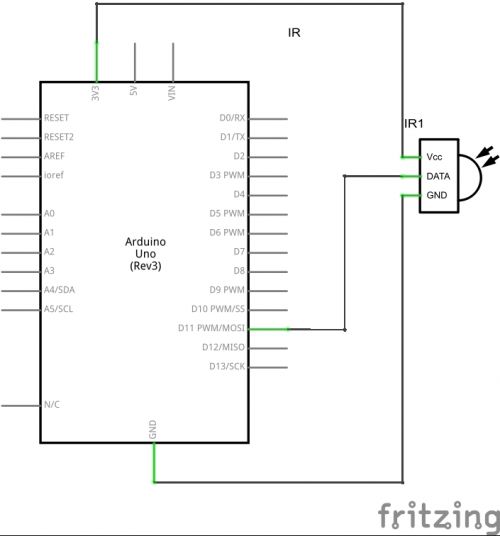
В сьогоднішній статті буде розглядатися підключення ІК приймача TSOP34836 до плати Arduino UNO. Для цих цілей можна застосувати будь-який наявний у вас приймач, сумісний з вашим пультом за частотою. Призначення виводів показано на малюнку.

1. Vout – вихід приймача.
2. GND – «земля», загальний провід.
3. Vcc – живлення.
Передача даних від ІК пульта до приймача здійснюється за протоколом RC5, який представляє собою послідовність імпульсів. Підключення здійснюється за наступною схемою.
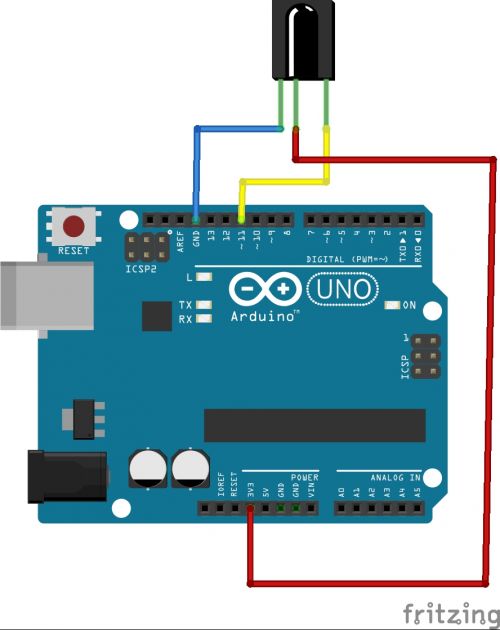
А зібравши, отримуємо приблизно таке:
Для обробки даних, що передаються пультом, використовуємо бібліотеку IRremote, дана бібліотека прикріплена до статті. Вставляємо наступний код:
#include "IRremote.h"
IRrecv irrecv(11); // Вказуємо пін, до якого підключений приймач
decode_results results;
void setup()
{
Serial.begin(9600); // Виставляємо швидкість COM порту
irrecv.enableIRIn(); // Запускаємо прийом
}
void loop() {
if (irrecv.decode(&results)) // Якщо дані прийшли
{
Serial.println(results.value, HEX); // Відправляємо отриману дану в консоль
irrecv.resume(); // Приймаємо наступну команду
}
}
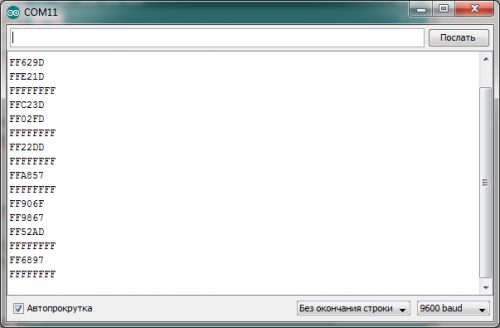
Тепер в консолі COM - порту можна спостерігати код натиснутої клавіші в HEX.
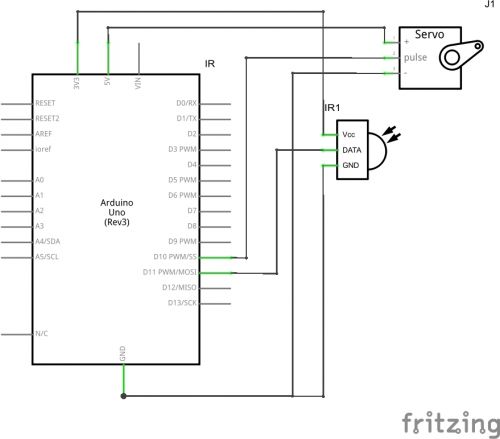
Ось і все, тепер можна використовувати цю схему у ваших пристроях. Нижче наведено приклад одного з практичних застосувань ІК - приймача.
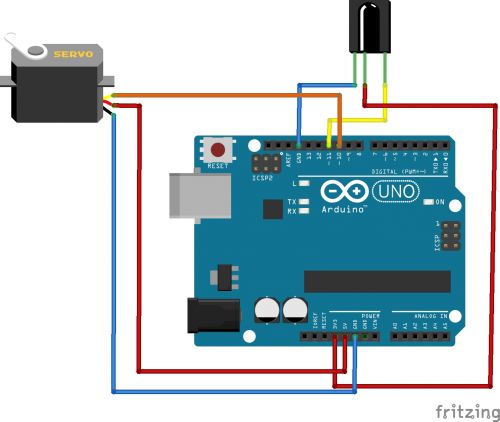
В якості демонстрації буде показано, як за допомогою ІК-пульта керувати сервомашинкою.
Схема пристрою:
Ось так воно повинно виглядати:
Для роботи пристрою використовуємо наступний код:
#include "Servo.h"
#include "IRremote.h"
IRrecv irrecv(11);
decode_results results;
Servo servoMain;
int servPoz = 90; // Початкове положення серви
int lastPoz = 0;
void setup()
{
irrecv.enableIRIn();
servoMain.attach(10); // Servo приєднано до 10 виводу
servoMain.write(servPoz);
}
void loop() {
if (irrecv.decode(&results))
{
int res = results.value;
Serial.println(res, HEX);
if(res==0xFFFF906F)// Якщо натиснута кнопка "+"
{
lastPoz=res;
servPoz++;
servoMain.write(servPoz);
}
else if(res==0xFFFFA857)// Якщо натиснута кнопка "-"
{
servPoz--;
lastPoz=res;
servoMain.write(servPoz);
}
else if(res==0xFFFFFFFF)// Якщо кнопку утримують
{
if(lastPoz==0xFFFF906F) servPoz++;// Утримують "+"
if(lastPoz==0xFFFFA857) servPoz--;// Утримують "-"
servoMain.write(servPoz);
}
irrecv.resume();
delay(100);
}
}
Пульт використовується якийсь китайський, при натисканні "+" серва обертається в один бік, при натисканні "-", в інший.
Прикреплені файли:
- IR.rar (123 Кб)
- Arduino_IR_lib.rar (23 Кб)