Плоттер на Raspberry Pi з використанням компонентів від CD-ROM
Механічні компоненти

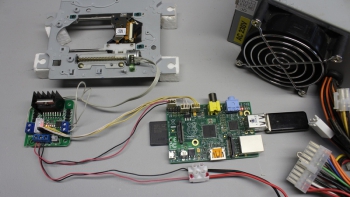
WLAN плоттер, що живиться від батареї, складається з компонентів від двох старих оптичних приводів, чотирьох H-мостів, сервопривода та мініатюрного комп'ютера Raspberry Pi.
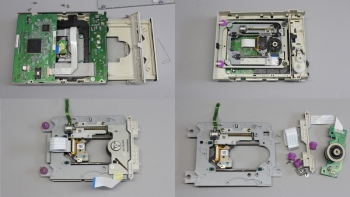
З оптичних приводів ми візьмемо механізми, що використовуються для переміщення лазерного блоку. Дана каретка управляється кроковим електродвигуном. На жаль, не всі оптичні приводи використовують кроковий електродвигун для приведення в дію лазерного блоку.
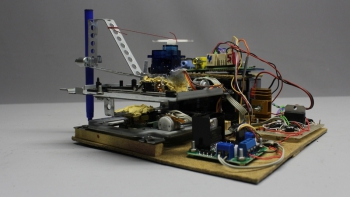
Я з'єднав обидва механізми перпендикулярно один до одного за допомогою невеликої смужки з перфорованого металу та епоксидного клею.
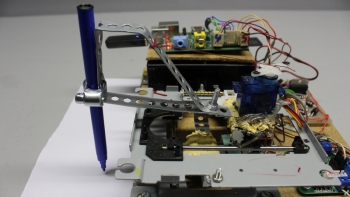
Тримач пера також виготовлений з смужки перфорованого металу, яка приклеєна до верхньої лазерної головки. Сервопривод використовується для згинання цієї металевої смужки, виконуючи, таким чином, підйом або опускання пера.
Електронні компоненти

Кроковий електродвигун має чотири виводи:
Пара виводів внутрішньо підключена до електромагнітної котушки. Використовуючи мультиметр, ви зможете легко визначити пару, підключену до котушки.
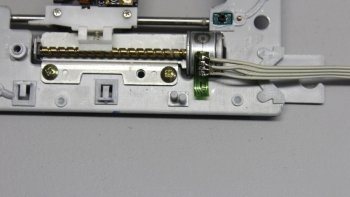
Не знімайте фольгу з виводів, оскільки при її відриві існує ймовірність зірвати й мідні проводи з виводів, що неминуче призведе до пошкодження двигуна!
Старі лінії живлення з фольгою можна обрізати.
Новий шлейф має бути припаяний до виводів.
Плата має чотири вихідні клеми:
Кожну пару виходів необхідно підключити до однієї з котушок на кроковому електродвигуні. Крім того, є ще чотири вхідні виводи, які слід підключити до виводів загального призначення GPIO мікрокомп'ютера Raspberry Pi. І, нарешті, 5 В джерело живлення потрібно підключити до виводів "Ground" та "VCC".
Одна котушка електродвигуна споживає струм близько 500 мА, що перевищує максимально допустимий струм, що надається 5 В виводом Raspberry Pi!
Отже, вам потрібно використовувати блок живлення від старого комп'ютера або окрему батарею, щоб забезпечити механізму необхідну електричну енергію.
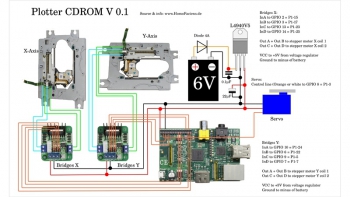
Схемне рішення для WLAN плоттера.
Програмне забезпечення
Програмне забезпечення працює в командному режимі, тому вам необхідно входити в систему через ssh для управління роботою WLAN плоттера. Джерельний код можна завантажити за наступним посиланням.
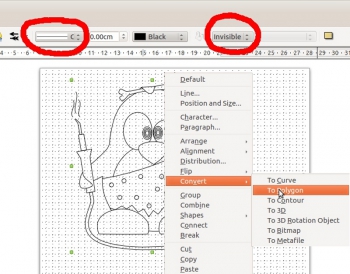
Програмне забезпечення дозволяє обчислювати растрові зображення (у форматі *.bmp) з роздільною здатністю 55 x 55 пікселів і глибиною кольору 24 біта. Будь-який інший тип растрових зображень буде проігнорований програмою. Пікселі з червоними, синіми або зеленими компонентами менше, ніж 200, вважаються чорними і будуть малюватися плоттером. Усі інші пікселі вважаються білими і пропускаються. Пристрій підтримує векторний формат "Scalable Vector Graphics – масштабована векторна графіка (*.svg)". При цьому слід зазначити, що малюються не області, а тільки їх контури. Усі траєкторії (і контури областей) повинні бути встановлені в режим "Polygon" (Замкнена лінія). Функціонування перевірялось на прикладі графічних файлів, які редагувалися і експортувалися в формат svg програмою Libre Office Draw.
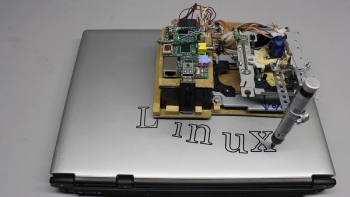
Завдяки спеціальній конструкції плоттера ви можете використовувати водостійке перо для малювання практично на будь-якій плоскій поверхні. Область, охоплювана пером, має площу 35 на 35 міліметрів. Для переміщення пера на 35 міліметрів необхідно виконати 250 кроків.
Напис, показана тут, звісно, більша, ніж область, охоплювана плоттером. Після написання одного символу, весь плоттер вручну переміщався вправо.