Прийом сигналу від кількох передавачів 433МГц на Arduino
Нещодавно купив кілька передавачів на 433МГц і зявилася необхідність приймати інформацію від двох передавачів.
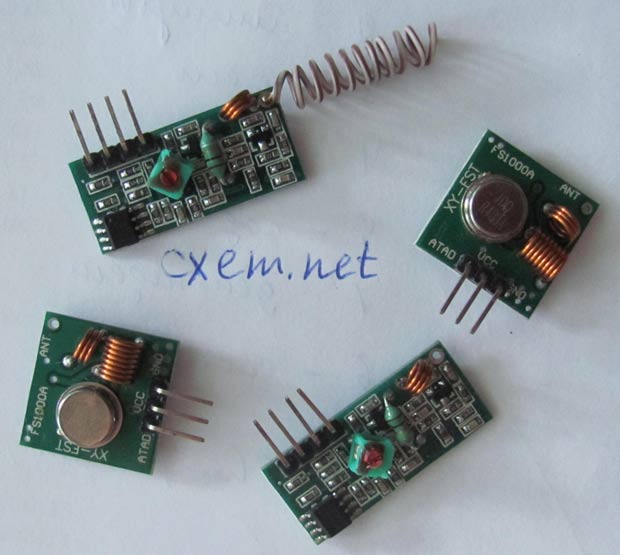
На приймачі/передавачі потрібно припаяти антену для більш стабільної роботи. Я використовував звичайний жорсткий провід довжиною 17 см, попередньо зробивши його у вигляді пружини.
Оскільки у мене було в наявності всього дві ардуїни, в якості третього передавача я вирішив запрограмувати Atmega328. Вийшов ось такий передавач:
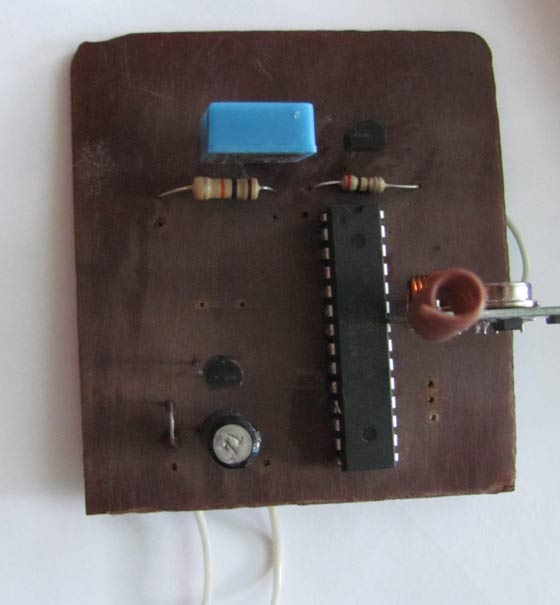
На платі стоїть датчик вологості DHT11 і датчик температури DS18B20, хоча можна було використовувати один датчик DHT22.
В якості ще одного передавача використав Arduino Nano:
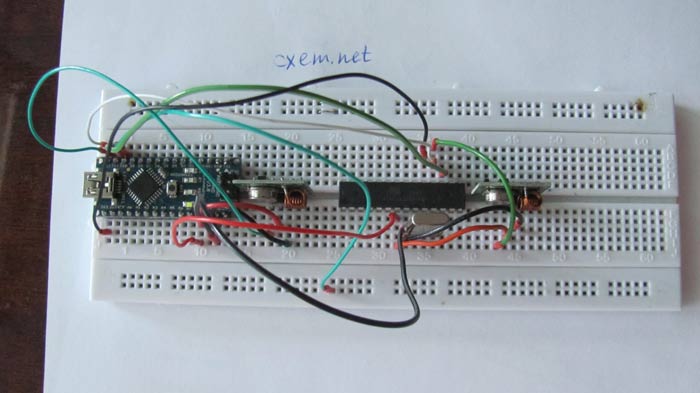
Ці передавачі, на відміну від першого, передають просто числа 22 і 11.
Схема підключення дуже проста:
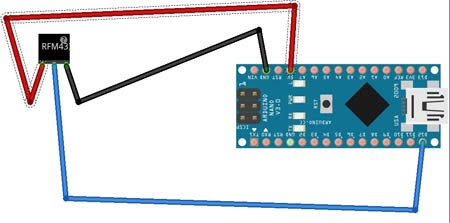
Vcc до +5, GND до -5В, а шина даних ADATA до D12 піну ардуїни.
Код передавача:
#include
#include "LowPower.h"
void setup(void)
{
vw_set_ptt_inverted(true); // Необхідно для DR3100
vw_setup(2000); // Встановлюємо швидкість передачі (біт/с)
}
void loop(void)
{
//Перерва на 8 сек, написано так у мануалі, а насправді на 22сек
LowPower.idle(SLEEP_8S, ADC_OFF, TIMER2_OFF, TIMER1_OFF, TIMER0_OFF,
SPI_OFF, USART0_OFF, TWI_OFF);
int number = 22;
char symbol = 'b';
String strMsg = "f ";
strMsg += symbol;
strMsg += " ";
strMsg += number;
strMsg += " ";
char msg[255];
strMsg.toCharArray(msg, 255);
Serial.println(msg);
vw_send((uint8_t *)msg, strlen(msg));
vw_wait_tx(); // Чекаємо, поки передача буде закінчена
delay(300);
}
Тут використовується дві бібліотеки VirtualWire і LowPower. (внизу статті посилання на бібліотеки) Перша бібліотека відповідає за передачу даних, а друга економить споживання енергії.
Рядок:
LowPower.idle(SLEEP_8S, ADC_OFF, TIMER2_OFF, TIMER1_OFF, TIMER0_OFF,
SPI_OFF, USART0_OFF, TWI_OFF);
знижує енергоспоживання на 8с (так сказано в даташиті бібліотеки), насправді мк не працює близько 23с. Нижче йде код формування і передачі пакета інформації в ефір, розглянемо детальніше.
Змінна strMsg містить у собі рядок, яку ми будемо передавати. Ми передаємо ось таку рядок: f_b_22_ (нижнє підкреслення символізує пробіл).
Код іншого передавача:
#include
#include "LowPower.h"
void setup(void)
{
vw_set_ptt_inverted(true); // Необхідно для DR3100
vw_setup(2000); // Встановлюємо швидкість передачі (біт/с)
}
void loop(void)
{
//Перерва на 8 сек, написано так у мануалі, а насправді на 22сек
LowPower.idle(SLEEP_8S, ADC_OFF, TIMER2_OFF, TIMER1_OFF, TIMER0_OFF,
SPI_OFF, USART0_OFF, TWI_OFF);
int number = 11;
char symbol = 'a';
String strMsg = "z ";
strMsg += symbol;
strMsg += " ";
strMsg += number;
strMsg += " ";
char msg[255];
strMsg.toCharArray(msg, 255);
Serial.println(msg);
vw_send((uint8_t *)msg, strlen(msg));
vw_wait_tx(); // Чекаємо, поки передача буде закінчена
delay(200);
}
Відмінність програм у тому, що в першій код передавача символ "z", а в другій "f", і ще головна особливість у тому, що програми працюють з різними затримками, спочатку одна передає в ефір інформацію а потім інша, що запобігає накладенню сигналів одне на одного.
Далі розглянемо код приймального пристрою:
#include
void setup()
{
Serial.begin(9600);
vw_set_ptt_inverted(true); // Необхідно для DR3100
vw_setup(2000); // Задаємо швидкість прийому
vw_rx_start(); // Починаємо моніторинг ефіру
}
void loop()
{
uint8_t buf[VW_MAX_MESSAGE_LEN]; // Буфер для повідомлення
uint8_t buflen = VW_MAX_MESSAGE_LEN; // Довжина буфера
if (vw_get_message(buf, &buflen)) {
int i;
int j;
if (buf[0] == 'z') {
i = 4;
int number = 0;
while (buf[i] != ' ') {
number *= 10;
number += buf[i] - '0';
i++;
}
Serial.print("1- ");
Serial.println(number);
}
else {
if (buf[0] == 'f') {
j = 4;
int number2 = 0;
while (buf[j] != ' ') {
number2 *= 10;
number2 += buf[j] - '0';
j++;
}
Serial.print("2- ");
Serial.println(number2);
}
}
}
}
Прийом і обробка здійснюється в циклі while (buf[i] != ' ') після того, як ми визначили, з якого датчика прийшла інформація.
Фото приймача:
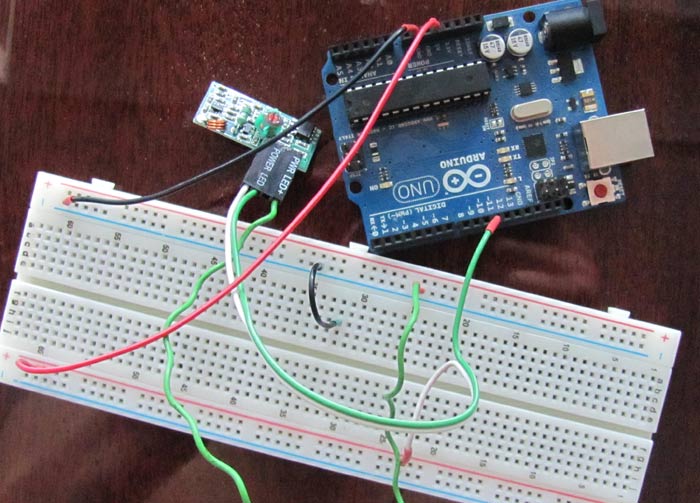
По суті приймач має три задіяні виходи плюс, земля і дані, але чомусь зробили два пини, що виводять дані.
Прикреплені файли:
- priem.ino (2 Кб)
- send_delay1.ino (1 Кб)
- send_delay2.ino (1 Кб)