Автоматична годівниця для акваріума

Як часто ви забували нагодувати своїх рибок?
Що стосується мене, то це відбувається досить рідко. Я не можу просто виїхати з міста на кілька днів і потім думати, на кого залишити свій акваріум.
Після того, як я придбав Sparkfun RedBoard, було прийнято рішення створити автоматичний пристрій для подачі корму в акваріум.
Ну що ж, поїхали...
Крок 1: Список використаних компонентів
* Arduino UNO або сумісний мікрокомп'ютер.
* Адаптер живлення напругою 9В або 12В.
* Кроковий двигун з напругою живлення 5В зі старого дисковода гнучких дисків.
* Перегородка від ящика з інструментами, потрібна саме гладка перегородка, яку я встановлю зверху підйомної кришки.
* Рычажний вимикач від стаціонарного телефону для індикації правильності закриття кришки.
* Корпус від жорсткого диска в якості контейнера для корму.
* Ламана пластиковий лінійка або будь-яка гладка пластина.
* Штатив CCTV-камери.
* Один резистор номіналом 10 кОм.
* Механічний AC Таймер.
Крок 2: Збірка


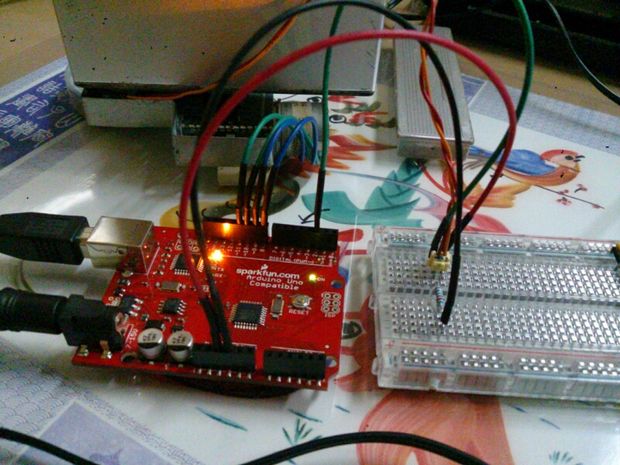
Конструкція годівниці, яка зроблена зі старих матеріалів, показана на малюнку номер 1. Я вирізав отвір з одного боку корпусу від жорсткого диска. Можливо, вам буде легше використовувати пляшку від мінеральної води, однак для пляшки потрібна опора, яка буде утримувати її в перевернутому положенні.
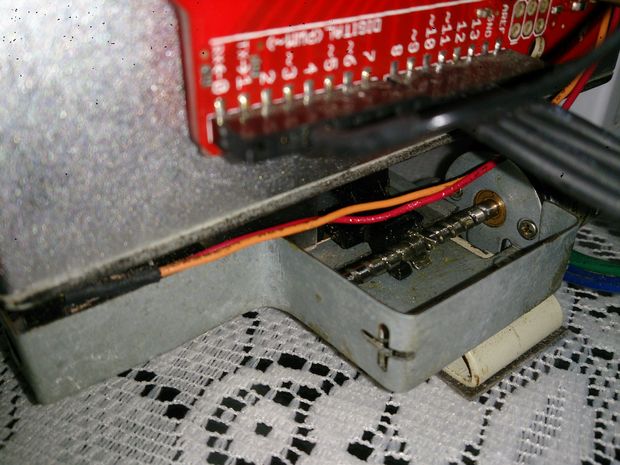
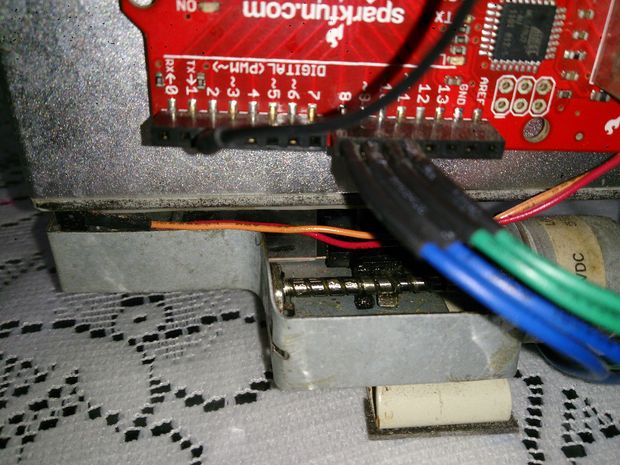
Я використав ось такий штатив CCTV-камери. Далі мені було потрібно всього лише просвердлити отвір у корпусі. Корпус має ідеальну висоту, що дозволяє встановити під нього кроковий двигун (малюнки номер 2 і 3).
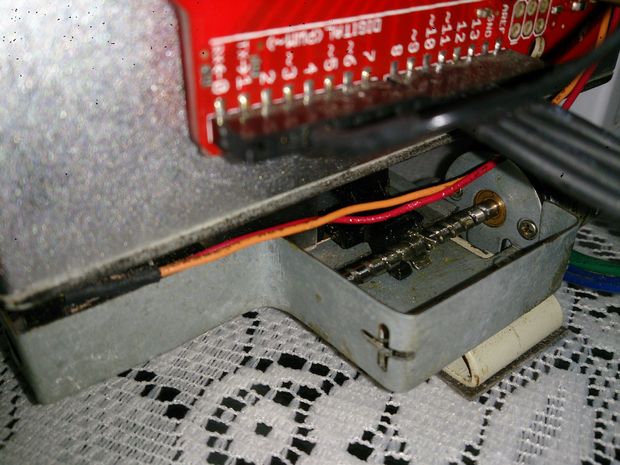
Далі для переміщення кришки я використав кроковий двигун напругою 5В з черв'ячною направляючою разом з її рухомим механізмом з дисковода гнучких дисків (компонент, що використовується для переміщення лінз дисковода; малюнки номер 3 і 4). Я помістив невелику гладку пластикову перегородку від ящика з інструментами зверху тримача лінз, нижче отвору корпусу, де передбачається вихід гранул корму (малюнок номер 2). Ви також можете використовувати поламані лінійки. Залиште пол або один міліметр від нижньої частини корпусу, інакше гранули корму не зможуть пройти через закриту кришку.
Крок 3: Доробка корпусу
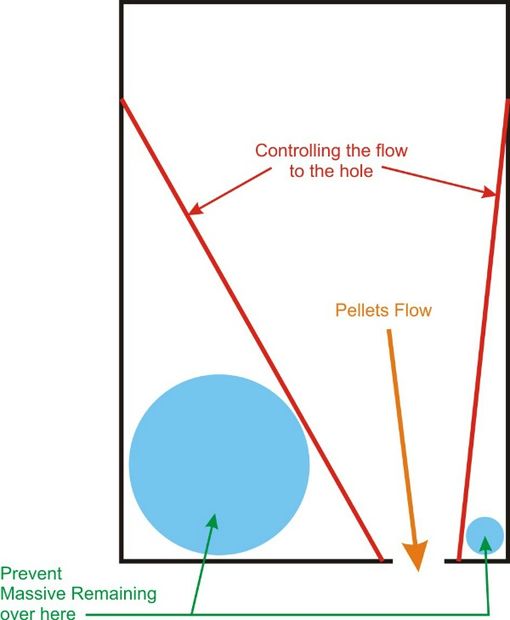
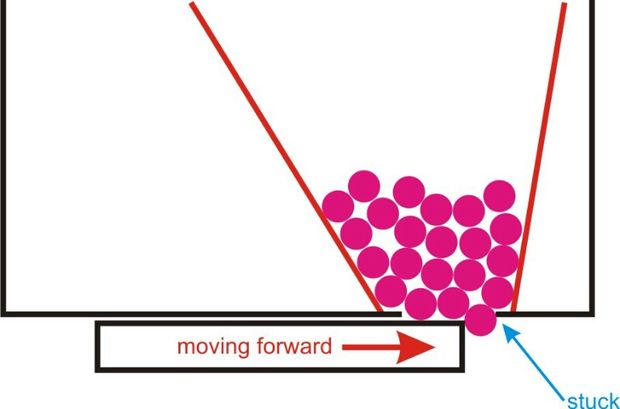
Контроль проходження потоку гранул корму через отвір, великі гранули не затримуються в лівій і правій частині корпусу.

Після кількох днів використання я виявив дефект на корпусі. Корм не виходив, хоча в контейнері було ще багато корму.
Потім я зрозумів, що гранули не проходять, як було задумано. Ось чому мені була потрібна поламана лінійка або будь-яка гладка пластина, яка підійде в контейнер і утворить "V"-подібну форму. Тепер усі гранули корму будуть проходити через отвір.
Крок 4: Електронні компоненти
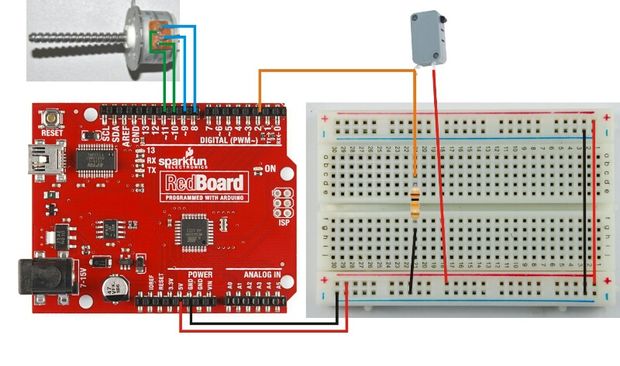
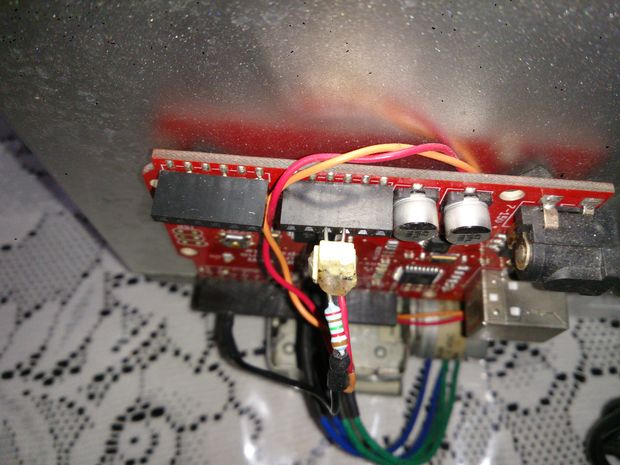
Встановіть кроковий двигун, вимикач, резистор 10 кОм, як показано на малюнку вище. Використання макетної плати спростить тестування та розуміння роботи схеми. Макетну плату можна буде використовувати для іншого проекту (див. останній малюнок вище, без макетної плати).
Підключіть чотири проводи крокового двигуна до цифрових виходів 8, 9, 10, 11.
Далі одну ніжку вимикача до виходу живлення 5В.
Іншу ніжку підключіть до землі через резистор 10 кОм і також не забудьте підключити до цифрового виходу 2.
Помістіть вимикач спереду підйомної кришки, і зігніть металеву частину, зробивши стопор (оранжевий і червоний кабелі на третьому малюнку). Коли вимикач переміщується вперед і натискає на стопор, мікроконтролер Arduino реєструє значення HIGH на виході вимикача і зупиняє двигун.
Я прикріпив ізолентой свою плату RedBoard (Arduino UNO) ззаду корпусу, а таймер з вилкою на його бічній стороні. Таймер з вилкою використовується в якості балансу для корпусу, щоб він правильно стояв.
Перший вихід корму відбувається правильно. При другому виході корму видно, що якщо гранули корму злиплися, і кришка неправильно закрита, тоді кришка переміщається назад і вперед, поки не закриється належним чином.
Тепер вам не потрібно брати акваріум з собою у відпустку. Тільки не забудьте перед від'їздом насипати корм у контейнер.
Прикреплені файли:
- auto_fish_feeder.ino (1 Кб)